逻辑回归算法 -- 二分类
在分类问题中,我们要预测的变量 $y$ 是离散的值,我们将学习一种叫做逻辑回归 (Logistic Regression) 的算法,这是目前最流行使用最广泛的一种学习算法。
分类问题
在分类问题中,我们尝试预测的是结果是否属于某一个类(例如正确或错误)。分类问题的例子有:判断一封电子邮件是否是垃圾邮件等。
我们将因变量(dependent variable)可能属于的两个类分别称为负向类(negative class)和正向类(positive class),
则因变量 $y\in { 0,1 \\}$,其中 0 表示负向类,1 表示正向类。
逻辑回归算法是分类算法,它适用于标签 $y$ 取值离散的情况,如:1 0 0 1。
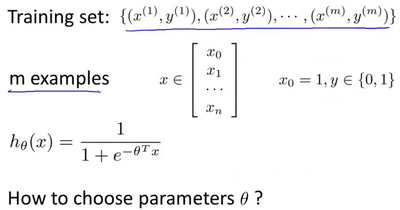
假说表示
在分类问题中,要用什么样的函数来表示我们的假设。我们希望分类器的输出值在0和1之间,因此,我们想出一个满足某个性质的假设函数,这个性质是它的预测值要在0和1之间。
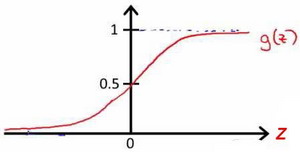
我们引入一个新的模型,逻辑回归,该模型的输出变量范围始终在0和1之间。 逻辑回归模型的假设是:$h_\theta \left( x \right)=g\left(\theta^{T}X \right)$ 其中:$X$ 代表特征向量,$g$ 代表逻辑函数(logistic function),一个常用的逻辑函数为S形函数(Sigmoid function),公式为:$g\left( z \right)=\frac{1}{1+{{e}^{-z}}}$ 。
python代码实现:
import numpy as np
def sigmoid(z):
return 1 / (1 + np.exp(-z))
该函数的图像为:
逻辑回归模型的假设:
$h_\theta \left( x \right)$ 的作用是,对于给定的输入变量,根据选择的参数计算输出变量=1的可能性(estimated probablity)即 $h_\theta \left( x \right)=P\left( y=1|x;\theta \right)$ 例如,如果对于给定的 $x$,通过已经确定的参数计算得出 $h_\theta \left( x \right)=0.7$,则表示有70%的几率 $y$ 为正向类,相应地 $y$ 为负向类的几率为1-0.7=0.3。
决策边界(decision boundary)
在逻辑回归中,我们预测:
当 ${h_\theta}\left( x \right)>=0.5$ 时,预测 $y=1$。
当 ${h_\theta}\left( x \right)<0.5$ 时,预测 $y=0$ 。
假设我们的数据呈现这样的分布情况,怎样的模型才能适合呢?
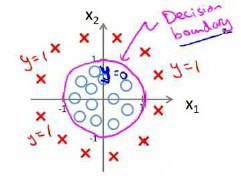
因为需要用曲线才能分隔 $y=0$ 的区域和 $y=1$ 的区域,我们需要二次方特征:${h_\theta}\left( x \right)=g\left( {\theta_0}+{\theta_1}{x_1}+{\theta_{2}}{x_{2}}+{\theta_{3}}x_{1}^{2}+{\theta_{4}}x_{2}^{2} \right)$ 是 -1 0 0 1 1,则我们得到的判定边界恰好是圆点在原点且半径为1的圆形。
我们可以用非常复杂的模型来适应非常复杂形状的判定边界。
代价函数
监督学习问题中的逻辑回归模型的拟合问题。
对于线性回归模型,代价函数是所有模型误差的平方和。理论上来说,我们也可以对逻辑回归模型沿用这个定义,但是问题在于,当我们将 ${h_\theta}\left( x \right)=\frac{1}{1+{e^{-\theta^{T}x}}}$ 带入到这样的代价函数中时,得到的代价函数将是一个非凸函数(non-convexfunction)。
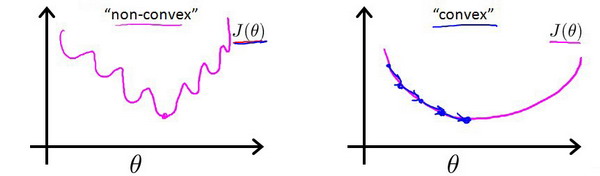
这意味着我们的代价函数有许多局部最小值,这将影响梯度下降算法寻找全局最小值。
线性回归的代价函数为:$J\left( \theta \right)=\frac{1}{m}\sum\limits_{i=1}^{m}{\frac{1}{2}{{\left( {h_\theta}\left({x}^{\left( i \right)} \right)-{y}^{\left( i \right)} \right)}^{2}}}$ 。
重新定义逻辑回归的代价函数为:$J\left( \theta \right)=\frac{1}{m}\sum\limits_{i=1}^{m}{{Cost}\left( {h_\theta}\left( {x}^{\left( i \right)} \right),{y}^{\left( i \right)} \right)}$,其中

${h_\theta}\left( x \right)$ 与 $Cost\left( {h_\theta}\left( x \right),y \right)$ 之间的关系如下图所示:
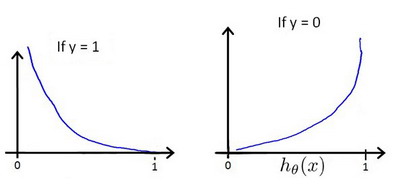
这样构建的 $Cost\left( {h_\theta}\left( x \right),y \right)$ 函数的特点是:当实际的 $y=1$ 且 ${h_\theta}\left( x \right)$ 也为 1 时误差为 0,当 $y=1$ 但 ${h_\theta}\left( x \right)$ 不为 1 时误差随着 ${h_\theta}\left( x \right)$ 变小而变大;当实际的 $y=0$ 且 ${h_\theta}\left( x \right)$ 也为 0 时代价为 0,当 $y=0$ 但 ${h_\theta}\left( x \right)$ 不为 0时误差随着 ${h_\theta}\left( x \right)$ 的变大而变大。 将构建的 $Cost\left( {h_\theta}\left( x \right),y \right)$ 简化如下:

Python代码:
import numpy as np
def cost(theta, X, y):
theta = np.matrix(theta)
X = np.matrix(X)
y = np.matrix(y)
first = np.multiply(-y, np.log(sigmoid(X* theta.T)))
second = np.multiply((1 - y), np.log(1 - sigmoid(X* theta.T)))
return np.sum(first - second) / (len(X))
这样一个代价函数,会是一个凸函数,并且没有局部最优值,我们便可以用梯度下降算法来求得能使代价函数最小的参数了。算法为:
Repeat { $\theta_j := \theta_j - \alpha \frac{\partial}{\partial\theta_j} J(\theta)$(simultaneously update all )}
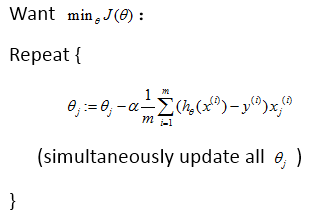
求导后得到:
Repeat { $\theta_j := \theta_j - \alpha \frac{1}{m}\sum\limits_{i=1}^{m}{{\left( {h_\theta}\left( \mathop{x}^{\left( i \right)} \right)-\mathop{y}^{\left( i \right)} \right)}}\mathop{x}_{j}^{(i)}$ (simultaneously update all )}
简化代价函数
逻辑回归的代价函数:

最小化代价函数的方法,是使用梯度下降法(gradient descent)。
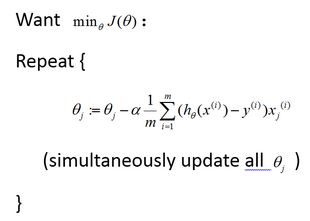
这就是我们通常用的梯度下降法的模板:
我们要反复更新每个参数,用这个式子来更新,就是用它自己减去学习率 $\alpha$ 乘以后面的微分项。求导后得到:
如果有 $n$ 个特征,也就是说: ,
,
参数向量 $\theta$ 包括 ${\theta_{0}}$ ${\theta_{1}}$ ${\theta_{2}}$ 一直到 ${\theta_{n}}$,就需要用这个式子:
${\theta_j}:={\theta_j}-\alpha \frac{1}{m}\sum\limits_{i=1}^{m}{({h_\theta}({{x}^{(i)}})-{{y}^{(i)}}){{x}_{j}}^{(i)}}$ 来同时更新所有的 $\theta$ 值。




相关推荐
深度学习 -- 损失函数
深度残差网络(Deep Residual Networks (ResNets))
深度学习 -- 激活函数
神经网络训练 -- 调整学习速率
生成对抗网络(GAN)改进与发展
生成对抗网络(GAN)优点与缺点
生成对抗网络(GAN)的训练
生成对抗网络(GAN)基本原理
生成模型与判别模型